All Posts
Robotarium GNN Simulation
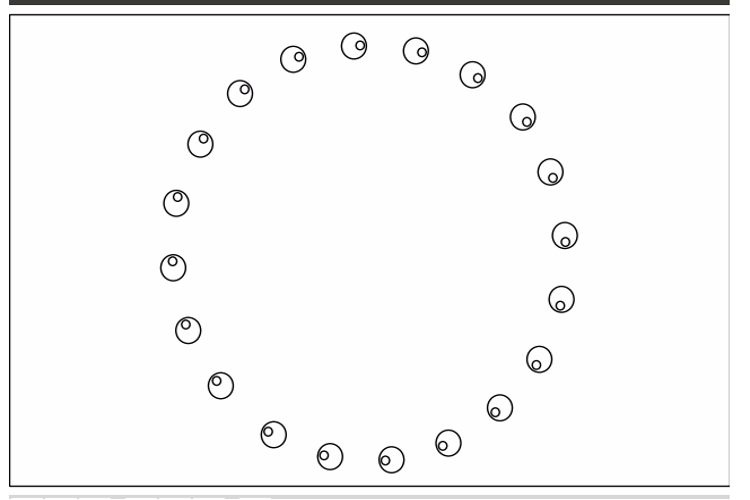
In the chaser model, agent ‘i’ tries to chase the agent ‘i+1’ excluding the edge case condition. In the simulations below, a time step is considered to be 0.
Robotarium Intro
Robotarium is a free multi-agents robots hardware platform launched by Prof. Magnus Egerstedt’s lab from GaTech. It is developed by the intention of bringing the multi-agent hardware platform accessible to everyone, as maintaining it is expensive and not everyone can afford it.
MPC - Collision Avoidance using Motion Capture
In this demo, I have used Model Predictive Controller to avoid a head-on collision for cars trying to swap their position following their given input trajectories.
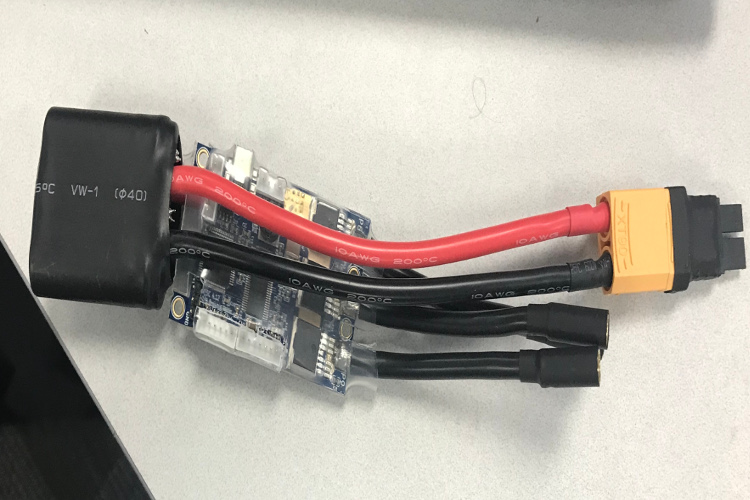
VESC Getting Started
My advice is if you are setting up for the first time, it is easy to do it on PC than TX2. Required Download VESC_tool from vesc-project.

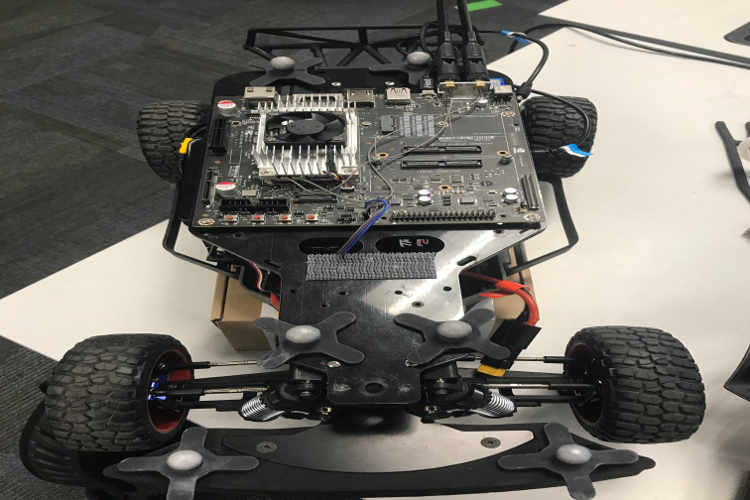
Updated design
Hardware design Our car is based on mit-racecar project but I had to optimize the design because I need to enclose the skeleton into the body to look like a real car.
